
 Print
PrintTechnical Information
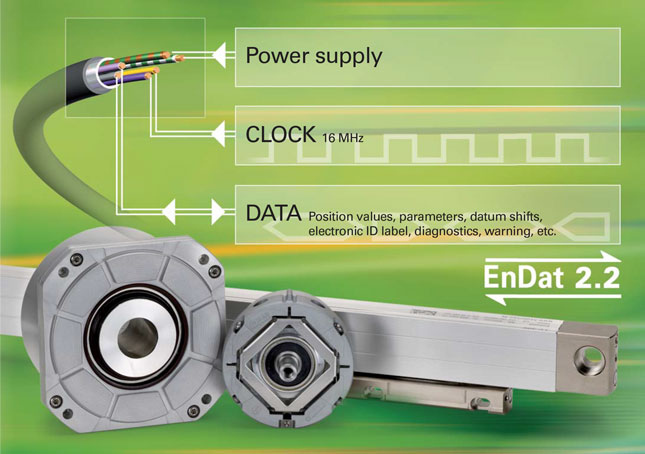
EnDat 2.2 – Bidirectional Interface for Position Encoders
Digital drive systems and feedback loops with position encoders for measured value acquisition require fast data transfer with high transmission reliability from the encoders. Further data, such as drive-specific parameters, compensation tables, etc. must also be made available. For high system reliability, the encoders must be integrated in routines for error detection and have diagnostic capabilities.
The EnDat interface from HEIDENHAIN is a digital, bidirectional interface for encoders. It is capable both of transmitting position values from incremental and absolute encoders as well as transmitting or updating information stored in the encoder, or saving new information. Thanks to the serial transmission method, only four signal lines are required. The data are transmitted in synchronism with the clock signal from the subsequent electronics. The type of transmission (position values, parameters, diagnostics, etc.) is selected through mode commands that the subsequent electronics send to the encoder. The EnDat 2.2 interface, a purely serial interface, is also suited for safety-related applications.
Benefits of the EnDat Interface
The EnDat interface provides everything needed to reduce system cost–per axis up to 50 %–and at the same time improve the technical standard. The most signifi cant benefits are:
Cost optimization
• A single interface for all absolute and incremental encoders
• Simple subsequent electronics with EnDat receiver chip and standard components
• Simpler, more economical power supply, since remote sensing is not required
• Simple connection technology: Standard connecting elements (M12 – 8-pin), single shielded standard cable and low wiring costs
• Small motor or system dimensions through compact connecting elements
• No expensive additional sensory analysis and wiring: EnDat 2.2 transmits additional data (limit switch/temperature/ acceleration)
• Faster confi guration during installation: Datum shifting through offsetting by a value in the encoder
Improved quality
• Higher system accuracy through specific optimization in the encoder
• High contour accuracy, particularly for CNC machine tools: position value formation in the encoder permits shorter sampling intervals without influencing the computing time of the CNC
Higher availability
• Automatic configuration of the system axis: all necessary information can be saved in the encoder (electronic ID label).
• High system reliability through purely digital data transmission
• Diagnostics through monitoring messages and warnings that can be evaluated in the subsequent electronics
• High transmission reliability through cyclic redundancy checking
Safety system
• EnDat 2.2 was conceived for safetyrelated machine designs
• Two independent position values for error detection
• Two independent error messages
• Checksums and acknowledgments
• Forced dynamic sampling of error messages and CIRCLE formation by subsequent electronics
Support for state-of-the-art machine designs
• Suitable for direct drive technology thanks to high resolution, short cycle times and commutation information
• Cyclic sampling every 25 μs with full "read and write" mode
• Position values available in the subsequent electronics after only approx. 10 μs
Compatibility of EnDat 2.2 > 2.1
EnDat 2.2 command set (includes EnDat 2.1 command set)
• Position values for incremental and absolute encoders
• Additional data on the position value
- Diagnostics, test values
- Absolute position values after reference run of incremental encoders
- Parameter upload/download
- Commutation
- Acceleration
- Limit position signal
- Position value 2 for safety-related applications or incremental encoders
EnDat 2.1 command set
• Absolute position values
• Send and receive parameters
• Reset
• Test command
• Test values
The extended EnDat interface version 2.2 is compatible in its communication, command set and time conditions with the previous version 2.1, but also offers significant advantages. It makes it possible, for example, to transfer what is termed "additional data" with the position value without sending a separate request for it. The interface protocol was expanded and the time conditions were optimized as follows:
• Increased clock frequency (CLOCK) (16 MHz)
• Optimized calculating time (position value acquisition within 5 μs)
• Minimized dead time (recovery time)
(1.25 to 3.75 μs)
• Expanded power supply range
(UP = 3.6
to 5.25 V or 3.6 to 14 V at encoder)
![]() For full technical article, please download the complete white paper.
For full technical article, please download the complete white paper.